The Ikarus collective pitch modification kit

What you get
The kit consists of several plastic bags heat sealed with all the parts inside. You get new blades, new swashplate (same as the original swash in my kit, at least), new head assembly, new linkages (the mainshaft is slightly longer than the original) and new mainshaft. The blades are made from hardwood, with a modified flat bottom airfoil. The centers are cut out and you cover the blades with supplied bright yellow self adhesive heat shrinkable covering. The blades also include lead tip weights.
Putting it together
Since my kit was direct from Germany, the instructions were in German. Since I do not read German well enough to follow what they are saying, I simply used my head and looked at the pictures. The illustrations are VERY good, and with a little common sense you can assemble the kit entirely from the pictures.I started with the head assembly. Insert two flanged bearings on either side of the two mixing arms and then screw them to the head. Slide two radial bearings into each of the grips and screw the grips to the head with bolts that tap into the head plastic. I am not entirely comfortable with that method... I am terrified that a grip will pull out. But there is no room for a nut, so I am flying it the way it was designed. Mark the center of the flybar and slide it into the head. I think the instructions tell you to roughen up the surfaces where the flybar arms and flybar paddles will attach, but I omitted that step. I was not sure I could accurately place the roughed up areas and was afraid that the roughed up portion of the flybar would enlarge the hole in the head. Attach the pitch arms to the pitch slider with two 2mm bolts. This is an ingenious arrangement... you pass the bolt through the hole and then slide a piece of tubing over the bolt and screw the bolt into the pitch arm. This allows for tracking adjustment... when you tighten or loosen the bolts, the tubing compresses or expands and allows the pitch arm to rise or fall. Insert the pitch slider into the center of the swash and snap a retainer and bearing onto the bottom and the head assembly is essentially done.
Mainshaft installation is routine. It installs the same as the original.
The hub supplied is the same as the original, and you can therefore also use your aluminum hub.
Ikarus supplies a small triangular plastic piece that fits into the space behind the mainshaft on the side opposite the aileron servo and acts as the mount for the pitch servo. Since I was converting my flybarless CP Piccolo, I had already made provisions for the pitch servo on the front of the mainshaft and mount the receiver where Ikarus has you mount the pitch servo. I elected to keep my pitch servo where it was and bent the pitch linkage to fit.

Setup
The setup I will describe is based on my use of a Futaba 8UAFS heli radio. I used the basic heli setup with conventional mechanical cyclic mixing and five point revolution mixing. The pitch curve is linear from 0 to 100%. I do not have a small pitch gage, so I simply set up the linkages so that the pitch went from a small amount of negative to the most positive that the head would allow. The throttle curve was then adjusted point by point to give a constant head speed as the pitch changed. After making sure that all the servos were centered and went in the right direction, I fired it up in my hand and found that the setup was basically very close. I trimmed the revolution mixing so that there was no obvious yaw tendency and then set it on the floor and.....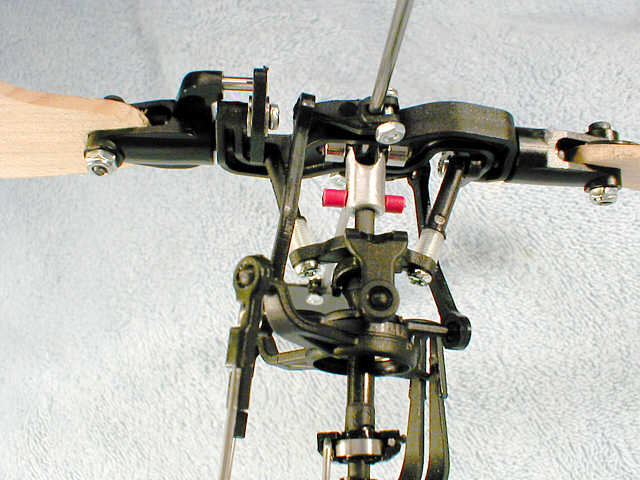
First flights
The first flight was in the basement and it lifted off and flew. It seemed to hover with a bit of a circular wobble to the rotor disk, so I landed and raised the head speed by changing the throttle curve. That seemed to take care of most of the wobble, but it will still do it once in a while, especially at lower head speeds. There is quite a bit of "delta" (I think that is the term) since the flybar arms are not in line with the center of the head bearings. As the head tips, the flybar rotates and I think this is intended to increase stability. I suspect that it also can make the system oscillate at lower head speeds. And no, I have not actually measured the head speed yet. By ear, it sounds like it stops wobbling at around 1400 RPM.
Liftoff is uneventful. It gets light on the skids and lifts off pretty well straight up. Hovering out of ground effect is very stable and the stability increases as head speed increases. Hovering in ground effect is a bit of another matter, though. For some reason, it seems very stable until it reaches about six inches altitude and then it starts to act strange. It will start to wander and there seems to be noticeable pitch/roll coupling that is not present out of ground effect. The control response is also either slightly non-linear or there is a longer response delay than there is out of ground effect. The effect is a little like the stock fixed pitch Piccolo.
Flying around out of ground effect is very lively and stable. I have not flown it out doors or in a large space, so I have not tried fast forward flight. However, I did fly in a 4 MPH breeze from an electric fan. It behaves similar to a larger heli... there are translational lift effects but it does not seem to get blown around as much as my flybarless version or the fixed pitch version. I did notice that if I tipped the heli on its side (holding it by the boom) it did not have enough control authority to roll back upright even though there is ample control authority for normal flying. This is quite different form the flybarless version, which has plenty or roll authority to right itself from a 90 degree roll in about 3 seconds.
Flying outdoors
OK, I'll admit that I was skeptical about Ikarus' claims of wind being "kein problem". My flybarless Piccolo was noticably better than the cut rotor brushless fixed pitch version and I was not sure that significant improvement was possible with a heli that weighed under 300 grams.Boy was I wrong! I flew the Ikarus collective pitch version today in winds of about 4 MPH gusting to 10+ and was absolutely amazed. There was quite a bit of translational lift variation as the wind gusted, but there was almost NO pitch or roll response to 10 MPH gusts. All I had to do to hover was to work the collective and hold a constant altitude. It needed very little cyclic correction. I did some simple figure "8"s with no problem at all. I was at our grass airplane field so I have to fly off a rubber mat that is about 2' by 3' in size (grass is too tall), and I had very little trouble landing on it even with moderate wind. And switching to 8 cells made it even better. The head speed increased as did the weight, and it was about as "rock" stable as you could expect. I am not convinced yet that it has the power to pull out of a poorly executed loop, but the stability gives me the confidence to try it that I didn't have with the flybarless version. And I should mention that the 8 cell pack I flew was my Panasonic 550 mAH NiMh pack which used to give me about 8 minutes of flybarless flight. I landed today after 9.5 minutes and still had some power to spare.
So hats off to Ikarus! Congratulations on a spectacular flying collective pitch micro heli. I have always said that if I could get the Piccolo to fly like my Raptor I would sell the Raptor. It may happen!
Flight time
This was a bit of a surprise. With my 1.5 year old 7X250 mAH Panasonic NiCd packs and Astroflight AF010 brushless motor I was getting 4.5 minute flights on fixed pitch or flybarless collective pitch. The Ikarus collective pitch modification gets between 5 and 5.5 minutes of flight out of ground effect with the same motor and battery. I have not flown a full pack on 8X700 mAH NiMh cells, but the short flight I did make was very smooth and fast. The head speed was near 2000 RPM and it was very stable.Issues
The kit is well designed and I do not have any serious issues with it yet. There are a couple small areas of concern though. These may turn out to be of no consequence after more flying.1. While the rotor head is apparently designed to pop off in a crash, I question whether it will do so cleanly and without damage. The pitch arms snap into the mixer arms with the snap horizontal, and that would seem to stress it severely if it has to disconnect. The pitch slider is attached to the pitch arm assembly with two very thin pieces of plastic that look guaranteed to break in a crash. Ditto for the anti-rotation yoke pins. I have a hard time calling this a real issue, however. In my opinion, any collective pitch heli has too much energy in the rotor to expect it to escape damage in the event of a crash.
2. Although I have the blades perfectly balanced (both spanwise and CG) there is still more vibration than I like to see on a heli. No, it isn't horrible. But I can't seem to get it perfect. I suspect there is something slightly out of static alignment but I can't find it. The tracking is perfect.
UPDATE.... it appears that the vibration is caused by the fact that the head is slightly warped and places the center of the rotor disk slightly off center. This causes an imbalance that cannot be completely corrcted by blade position or balance.
UPDATE.... Confirmed. I heated the culprit head arm and gently straightened it and the vibration is gone. With the blade bolts loose enough to allow the blades to center, there is little or no vibration on the ground or in flight.
3. I would really like to see a one way bearing. No, it is not needed for use with a brushed motor unless you want to try autos. But a brushless motor stresses the mainshaft more than a brushed motor on startup. I suspect that Nath will be on top of this one! He has a nice one way bearing kit for the fixed pitch Piccolo.
4. There is a circular wobble in ground effect that increases as the head speed drops. While it is never out of control, it can make landing more difficult if you wait until the heli can not climb out of ground effect. I am guessing, but I think it may be related to the head design and the fact that the flybar rotates as it tilts. If you hold the heli and then tilt it slightly and observe the rotor disk, it seems to introduce a cyclic response that is somewhat out of sync with the direction of rotor disk (or heli) displacement.